인프라 협력 센싱 기술 개발 (V2I)
- V2X 통신을 통해 인프라와 협력하여 사각지대의 상황을 공유하는 협력 센싱(cooperative sensing)
- 관제센터가 교차로 등 사각지대에 설치된 고정 카메라의 영상을 실시간 처리하고, V2X통신 통해 검지된
정보를 자율주행자동차 (ive)에게 전달




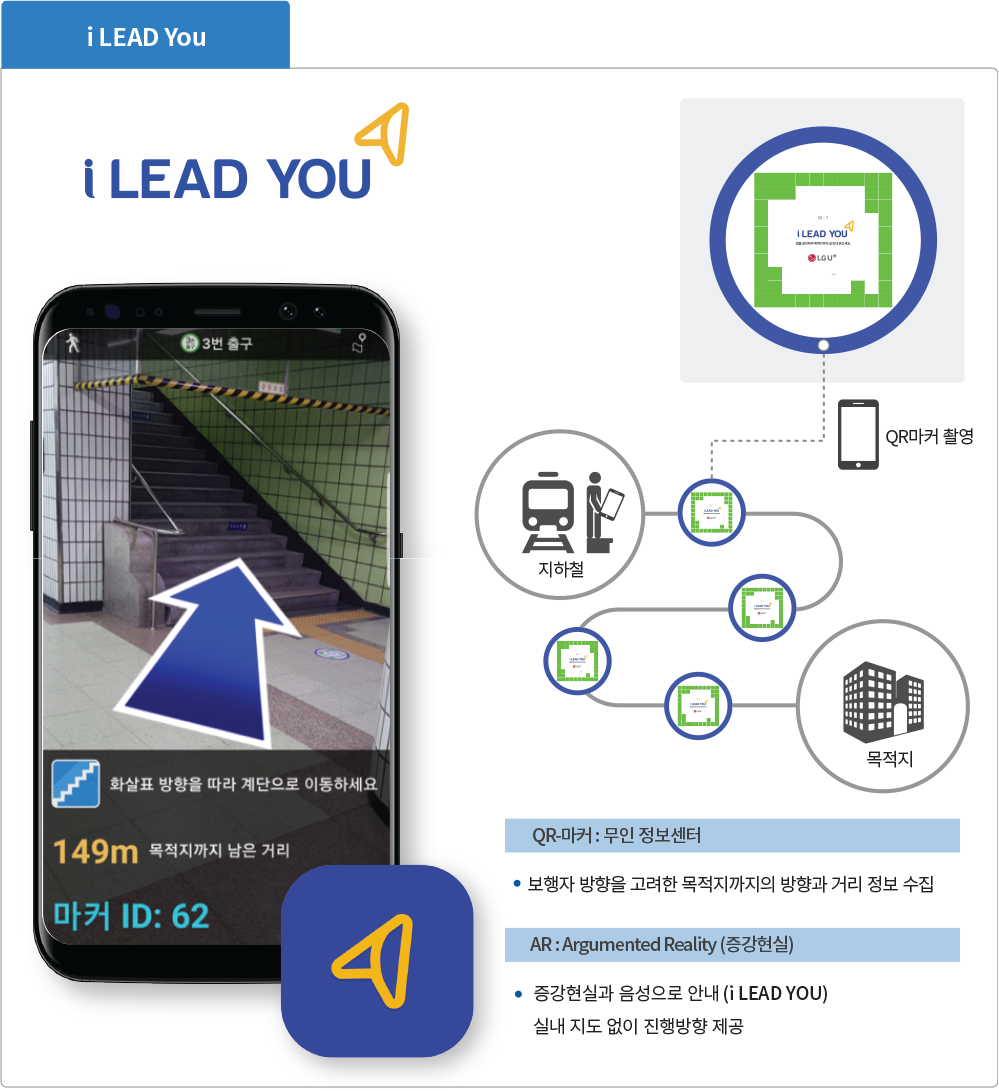
해외에서 또는 해외로 더 먼 길을 왔는데, 코 앞에서 헤메고 있는 경험 누구나 한번쯤은 있겠죠.
이젠, i LEAD You 앱이 증강현실을 통해 실내공간 구석 구석 안내하게 됩니다.